KIT 金沢工業大学
機械系のロボティクス技術者として、ロボット要素設計、センシング、システム制御、知能情報化などに関わる基礎知識と基盤技術を修得し、さらに、これらの知識と技術を統合的に活用して社会や生活に役立つロボットや新しい知能機器システムを創造できる、広い視野と倫理観をそなえた技術者を育成する。
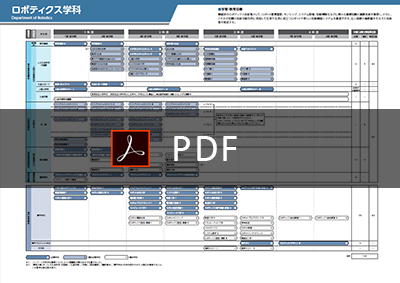
クリックすると別ウィンドウで拡大します。(PDF・212KB)
社会を支える「ものづくり」の三大技術である機械分野、電気・電子分野、情報分野の技術について、工学と社会とのつながり、歴史および現在、未来の技術について学び、「自ら考えて行動する技術者」としての第1歩を歩み出す意識を明確にする。各分野における学ぶ領域、学問の拡がりを学び、各自の将来の目標、夢を実現するためのキャリア形成を意識して、修学計画能力を身につけ、今後の学習姿勢を確立する。「覚える・暗記する」学習だけでなく、現象や物事の本質を論理的に考える力(科学力)、デザイン力の醸成を目標とする。
行動目標●現代社会における工学部の役割を理解し、自身の修学計画を立案することができる。ロボティクス学科の「学ぶ領域」、研究分野を理解し、今後の勉学の方法、履修計画について主体的に考えることができる。ロボット要素技術について概略を説明できる。計測・制御および知能情報化技術について概略を説明できる。システム統合化技術について概略を説明できる。自身のキャリア形成プロセスを自身の言葉で述べ、それを第三者に伝える事ができる。
機械製図の基礎となる正投影の原理を学ぶとともに、正投影を用いて描かれた機械図面から部品の三次元形状をイメージできる能力を修得する。さらに、機械製図の基礎となる規格について学ぶ。これらは、機械技術者が図面を用いながらさまざまな情報を交換するために不可欠な基礎能力である。演習では、手書きによる製図スキルとともに、図面を効率的に作成・編集するためCADソフトウェアの操作スキルを修得する。
行動目標●正投影の原理を理解し、三角法で機械部品の形状を表現できる。機械図面の基礎的な製図規則を理解し、簡単な形状の機械部品について正面図、平面図、側面図を正確に描ける。立体図の作成法を理解し、等角図およびキャビネット図を作図することができる。幾何学的に正確な手法を用いて複雑な形状を持つ部品が作図できる。機械設計の基礎である公差・精度の指示を理解できる。手書きに加えて、2D-CADの基本的な図形生成機能と図形編集機能を駆使し、図面を作成することができる。
力学は機械系科目の基本、ロボットの機構設計や運動解析の基礎となる。この科目では、静力学における基本的な概念(力、力のモーメント、重心、慣性力など)を理解し、さまざまな機械あるいは機械部品に対してどこにどのような力が働くかを求めるといった力学的解析能力を身につける。
行動目標●物体に作用する力を適切に表示し、その大きさをSI単位系で表すことができる。力の概念を理解し、複数の力を合成したり、力の任意の方向成分を求めることができる。力のモーメントの概念を理解し、力のモーメントを計算することができる。力の釣り合いについての式を立て、計算ができる。重心(あるいは図心)の概念を理解し、重心や図心を求めることができる。運動と力の関係を理解し、慣性力の計算ができる。
機械製図は、設計者がイメージした形体や特徴を有する機械を規格に沿った図面で表すものであり、同時に、図面に基づいて第三者に設計の意志を伝達する役割を有する。本講義では機械製図の基礎となる規格や製造方法に基づく部品設計や精度、公差の指示方法を学ぶ。あわせて部品の三次元形状に基づき製造図面として二次元図面へ正確に展開することで、設計仕様を要求でき、第三者へ形状を伝達できる能力を修得する。また、製図演習では図面を効率的に作成・編集するためのCADソフトウェアを用いることで、コンピュータを援用した設計基礎能力を修得する。
行動目標●CADソフトウェアを使用しコンピュータを援用した機械製図を行うことができる。機械部品の鳥瞰図あるいは写真から二次元の機械図面をJIS機械製図規則に則って描くことができる。第三者が作成した二次元の機械製図から、そこに描かれている部品の形状をイメージできる。二次元の機械製図図面の内容を第三者へ伝達することができる。機械部品の製造方法を考慮した機械設計や公差・精度の指示を行うことができる。予習・復習の成果を作品(製図)としてまとめ、指定された時間に提出できるとともに、その内容を説明できる。
力学は機械工学の基本である。「ロボット基礎力学 I 」では、質点や剛体に作用する力の釣り合いなどの静力学を主として学習した。本講義ではその基礎をふまえ、「ニュートンの運動方程式」から始める。質量のある質点や剛体は外から力やトルクを受けるとどのような運動をするか、即ち、動力学の基礎について学習する。この科目は以降の専門科目の諸力学の理解に不可欠であり、ロボットに代表される複雑な機械の設計、解析に必要な知識を得ることができる。
行動目標●簡単な形状の物体について重心・慣性モーメントを計算することができる。質点系の重心まわりの運動が説明できる。運動量保存則を利用して様々な衝突現象を解析できる。角運動量保存則を利用して様々な機械モデルの動的挙動を説明できる。重力や復元力をうけた質点の運動について力学的エネルギー保存の式を立てることができる。剛体の回転運動・平面運動について運動方程式および運動に関連する式を立てることができる。
「修学基礎A・B」を引き継ぎ、各専門分野におけるレポート作成スキルを育成する。問題発見、問題解決するプロセスにおいては、自己の考えや主張をレポートとしてまとめ、情報を発信する能力が必要である。これを「個人」の能力として身につけさせるために、学科の専門性に則したテーマでレポートの作成手順を学習するとともに成稿することにより、専門科目のレポートおよび論文作成の入門として位置づける。
行動目標●ロボット工学の分野における問題を発見し、レポートのテーマを設定できる。ロボット工学の分野における情報を収集・分析・整理することができる。ロボット工学の分野に則したレポートが作成できる。
材料力学は、形あるものの各部に作用している力や変形状態を明らかにするもので、構造設計の基礎となる重要な学問である。特にロボットアームなどの設計において、高速・高出力化、巧みな制御を実現するためには、負荷に耐え変形や破壊を防ぐ構造が必要であり、その検討には材料力学が不可欠である。本科目では、応力、ひずみといった基礎的概念からスタートし、講義と演習により段階的に理解を深めていく。はりのたわみの解析では微分方程式を導入し、従来は公式に頼っていた解法をシステム化することを試みる。
行動目標●応力、ひずみの概念を理解できる。応力‐ひずみ線図が描け、変形や特性が説明できる。はりの剪断力、曲げモーメントを理解し、SFD、BMDが描くことができる。荷重条件から、はりのたわみの微分方程式を導くことができる。はりのたわみの微分方程式を解くことができる。
ロボティクスは機械工学、エレクトロニクス、情報制御工学の複合領域であり、この分野の技術者にはエレクトロニクスに関する知識が不可欠である。本科目では、エレクトロニクスの基礎として、電気回路上での種々の現象を数式によって表現し、分析する能力を修得する。
行動目標●直流電源、抵抗、キャパシタ、インダクタから構成される回路の過渡現象を数式で表現し、電圧、電流の時間的経過を求めることができる。正弦波交流回路の電圧、電流、インピーダンス、電力などを数式で表現し、計算することができる。
ロボットを実現するために役立つ、信頼性の高いプログラムを作成することができるようになるために、そのようなプログラムの基盤となるアルゴリズムとデータ構造の基礎を学ぶ。
行動目標●基本的なアルゴリズムとデータ構造を理解することができる。基本的なアルゴリズムとデータ構造に基づく、教科書の例程度のプログラムを作成することができる。
知能ロボットにおいては、運動制御のみならず環境情報取得のためにプログラムが必要不可欠である。本科目では、C言語の基礎を学ぶ。また、プログラミングを用いた社会(特に地域社会)との連携についても考える。
行動目標●C言語の基本的な文法および教科書の例程度のプログラムの動作を理解することができる。教科書の例程度のプログラムを作成し、実行することができる。
ロボットは、運動機能、骨格、動力・エネルギー、感覚や神経および知能を創造する5つの技術などのいくつかの要素技術を統合したものであり、それらはさまざまな材料を用いて造られている。本講義においては、ロボット材料として重要なセンサやアクチュエータ材料として使われる無機の金属材料、半導体材料、絶縁体材料および有機のプラスチック材料や高分子材料についてその基本特性と用途について学習・理解する。
行動目標●ロボットに使われている材料がどのようなものか説明できる。金属、半導体および絶縁体がどのように異なるか説明ができる。センサ材料としてどのような物質のどのような性質が使われているか説明できる。アクチュエータ材料としてどのような物質のどのような性質が使われているか説明できる。マイクロセンサ・アクチュエータを作製する技術の概要が説明できる。
本科目では、ロボティクスを学ぶために必要な数理の知識を修得するとともに、同学期に開講されている科目の内容に関連する講義と演習を行うことで、それぞれの基礎学力をさらに高めることを目標とする。
行動目標●ロボット材料力学の学習内容の基礎知識を修得し、応用できる。電気電子回路 I の学習内容の基礎知識を修得し、応用できる。自ら学び考える学習習慣を身につけ、実践できる。
①質点、質点系、剛体の運動方程式を理解し、現象から運動方程式を立てられること。②運動方程式を解き、得られた解を評価できること。③上記に必要な数学的知識が修得できていること。
行動目標●簡単な形状の物体の重心及び慣性モーメントが計算できる。重力、減衰力、復元力を受けた質点の運動方程式を解くことができる。質点及び剛体の運動に対してラグランジュの方程式を立てることができ、それよりニュートンの運動方程式を導くことができる。
動的システムの解析、設計に必要な数学で、ロボット工学を学ぶ上で重要な複素数、ラプラス変換、微分方程式の解法を重点に学び、これらのツールをロボット工学のさまざまな科目に応用することができるようにする。複素数、微分方程式はロボットなどの動く機械やシステムの振る舞いを記述し解析する上での基本である。ラプラス変換は微分方程式の解法、制御工学の導入として重要な数学的道具である。本科目ではこれらに加え、伝達関数やブロック線図などの制御工学で用いられる表現方法について学ぶ。
行動目標●複素数の演算ができる。ラプラス変換の基本性質が理解できる。線形微分方程式が解ける。機械や電気回路を中心とする簡単なシステムの数学モデルが伝達関数を用いて表現できる。ブロック線図を用いて信号の流れを表せる。
本科目では、機械や簡単な電気要素の組み合わせによって得られる機械システムの動的挙動の捉え方として、インパルス入力やステップ入力による過渡応答法について学習する。また、フィードバック制御の基本事項となる周波数応答に基づく制御系解析について修得する。具体的には、ベクトル軌跡やボード線図を用いて、周波数特性を図的に表現できるようにする。さらに、自動制御系の安定判別法について学ぶ。
行動目標●電気回路や機械システムなどにおけるステップ応答が導ける。システムの動的特性を、周波数応答特性として特徴を表現でき、ボード線図やベクトル軌跡の意味を理解し描ける。簡単な機械システムの安定性がイメージでき実際に安定性の判別法が使用できる。
ロボティクスは機械工学、エレクトロニクス、情報制御工学の複合領域であり、この分野の技術者にはエレクトロニクスに関する知識が不可欠である。ロボティクスにおいて重要なエレクトロニクスの基礎として、ディジタル回路、コンピュータと機械とのインタフェース、アナログ回路に関して学び、様々な電子回路の動作を理解する能力を習得する。
行動目標●ディジタル回路の動作を説明できる。ステッピングモータ、DCモータ、およびコンピュータと機械とのインタフェースについて説明できる。アナログ回路の動作を説明できる。
ロボットの設計演習として、自立走行するマイコンカーの設計製作を行う。この演習を通して、設計製図技術を身につける。さらに、機構設計や機械加工に係る知識や技術を実践的に活用し、形にする能力を養う。
行動目標●機械設計に必要な設計項目を理解し、第三者に説明できる。設計のフローを理解し、概略設計および詳細設計を行うことができる。CADツールを用いて製図規格(JIS製図法)に従った製図を行うことができる。機械製作法を考慮した組立図、ならびに部品図を作成することができる。
ロボットを思い通り動かすにはコンピュータの知識が必要であり、ソフトウェアとハードウェアの関連を正確に理解する必要がある。本科目ではマイコンの基礎を学び、LED点灯などの基本的なプログラム作成法を修得する。
行動目標●マイコンの役割とプログラムの流れを理解できる。I/Oポートの役割を理解し、入出力プログラムを作成および動作させることができる。割り込み処理を理解し、タイマ割り込みプログラムを作成および動作させることができる。シリアル通信の役割を理解し、送受信プログラムを作成および動作させることができる。
ロボットなどのシステムにおける状態の推定、監視、制御あるいは、研究開発のツールとして、計測工学特にセンサの果たす役割は重要である。本講義では、物理量、化学量の測定に使われるセンサ技術について考えるとともに学習する。さらに、その応用例として、特に、ロボットに搭載されるセンサシステムの基本原理、構成などについても考え学ぶ。以上の勉学を通じて、問題発見・解決能力、力学・設計基礎能力および専門応用能力を身につける。
行動目標●センサの必要性を説明できる。センサおよびアクチュエータとは何か説明できる。各種センサの原理および構成を説明できる。センサの信号処理技術の必要性について説明できる。ロボットに搭載されているセンサ技術について説明できる。
本科目では、ロボティクスを学ぶために必要な数理の知識を修得するとともに、同学期に開講されている科目の内容に関連する講義と演習を行うことで、それぞれの基礎学力をさらに高めることを目標とする。
行動目標●ロボット応用力学 I の学習内容の基礎知識を修得し、応用できる。システム数学 I ・制御工学 I の学習内容の基礎知識を修得し、応用できる。自ら学び考える学習習慣を身につけ、実践できる。
メカトロニクス技術の制御対象は機械であり、その基本は運動機構である。システムが全体として機能を発揮するためには、プログラムや制御回路とともに運動機構が適切に設計されていなければならない。この科目ではリンク機構と歯車機構およびロボットを中心として運動自由度、運動学、静力学、動力学などについて学習する。
行動目標●メカニズムの基本知識(対偶の運動自由度、インボリュート歯車の基礎円、圧力角など)を得ることができる。メカニズムの運動自由度を計算し、ジョイントの種類を変えることができる。平行リンク機構の種類や特徴を説明することができる。数式や作図により平行リンク機構の運動解析ができる。歯車機構の動作メカニズムを理解し、複数の歯車を組み合わせた機構の運動解析ができる。
近年の機械は生産性を向上させるために高速化、高精度化が図られている。これによって各種機械で発生する振動が問題化しており、機械系技術者は機械の振動問題に対する基礎的な知識を持つ必要がある。そこで、本講義では機械に生じる振動問題の基礎を理解し、設計に応用できるようにするために、それらの基本的現象をモデル化し、力学的に解析する方法を修得する。
行動目標●機械の振動をモデル化し、運動方程式が導出できる。運動方程式(微分方程式)の解を求めることができる。減衰のない振動系と減衰のある振動系の強制振動について理解し、その特徴を説明することができる。1自由度・2自由度振動系に対する運動方程式が導出でき、その解が求められる。簡単な振動の問題を総合的に解析し現象を捉えることができ、その動的挙動の解析・評価ができる。
機械を構成する要素技術を理解し、設計計算を行う。その計算結果を基に、機械設計や機械加工に係る知識や技術を実践的に活用し、機械製図を描く能力を養う。
行動目標●機械設計に必要な設計項目を理解し、第三者に説明できる。設計のフローを理解し、概略設計および詳細設計を行うことができる。CADツールを用いて製図規格(JIS製図法)に従った製図を行うことができる。機械製作法を考慮した組立図、ならびに部品図を作成することができる。
本熱流体力学は、流体力学及び伝熱の基本的事項について学ぶ。流体力学は、静止中での流体の性質を学び、次に流れている場合の流体の性質について学ぶ。一方伝熱では熱の伝わる形態、熱伝導及び熱伝達について学ぶ。ロボット技術者にとっても、例えば空気中や水中のロボットアーム、無人航走体等の設計時の外力や熱分布の見積もりに有効な知識を提供する。
行動目標●静止流体の圧力分布を理解できる。連続の式、ベルヌーイの式などから圧力分布が計算できる。流れ場での圧力損失が理解できる。熱伝導、熱伝達が理解でき、簡単な計算ができる。
制御系の解析、特性評価技術を基礎として、本講義では制御系を、必要かつ十分な情報である内部状態を利用して設計する手法を学習する。その内容はシステムの状態方程式表現、システムの挙動、システムの可制御、可観測、内部安定、状態フィードバック、最適制御であり、これらを使って簡単な自動機械の制御系の解析、設計が目的に適合するようにできる。
行動目標●動的システムの解析、設計に微分方程式論、線形代数が応用できる。制御系の特性が、安定性、定常性、速応性の観点から評価できる。簡単な機械システムの制御系設計において、簡単な仕様を満足するように設計することができる。状態方程式の概念が理解でき、状態方程式を使ってモデル表現できる。簡単な状態フィードバック制御が構成できる。
動的システムのモデル化、解析手法、制御方法を制御系設計CADを用いてシミュレーションする方法を学習する。伝達関数表現されたモデルに対する過渡応答特性や周波数応答特性の解析手法を修得するとともに、制御系設計のためのシミュレーション方法の修得を目的とする。
行動目標●制御系設計CADの基本的な使い方がわかる。動的システムのモデルを導出し、過渡応答、周波数応答をシミュレーションできる。ベクトル軌跡やナイキスト軌跡を利用して、制御系の安定性や特性を読み取ることができる。ボード線図を利用して、制御系の安定性や特性を読み取ることができる。簡単な動的システムの制御系設計や解析ができる。
メカトロニクスは、メカニズムとエレクトロニクスあるいはコンピュータ技術が複合してできた技術分野である。関連の技術が複合・融合することによって、機械の機能や性能を飛躍的に向上することを狙いとしている。最近の機械あるいは機械システムはメカトロニクスなしでは成り立たないと言って過言でない。本科目では、メカトロニクスの要素技術であるエレクトロニクス、サーボ機構、センサ、アクチュエータ、信号変換・処理技術などについて学び、さらにその応用技術を理解する。
行動目標●メカトロニクス技術を理解し、その技術を使った実例を他人に説明できる。制御用センサの仕組みと使い方を理解し、その内容を他人に説明できる。アクチュエータの構造と特徴を理解し、その内容を他人に説明できる。センサやモータをマイコンと接続するインターフェース回路を理解し、その内容を他人に説明できる。
ロボット工学など動的システムの解析、設計に重要かつ必要な線形代数の基礎について学習する。専門科目を履修する上で必要な概念や演算について自在に使えるよう反復演練し、ロボットの制御や解析に必要な基礎知識と論理的思考力を身につける。
行動目標●ベクトル空間の概念が把握でき、演算ができる。ベクトルの一次独立、従属が判断でき、ベクトル空間の基底や次元を求めることができる。線形写像と連立方程式の関係が理解でき、連立方程式の一般解を求めることができる。固有値、固有ベクトルの算出ができる。
本科目では、ロボティクスを学ぶために必要な数理の知識を修得するとともに、同学期に開講されている科目の内容に関連する講義と演習を行うことで、それぞれの基礎学力をさらに高めることを目標とする。
行動目標●ロボット応用力学 II の学習内容の基礎知識を修得し、応用できる。ロボット運動機構学の学習内容の基礎知識を修得し、応用できる。自ら学び考える学習習慣を身につけ、実践できる。
最近のシミュレーション技術の発展により、ロボットにおいてもシミュレータを使い実機を動かす前に動作プログラムを検証することが一般的になった。本講義では、まず、代表的なロボットである車輪型、腕型、脚型ロボットを動作させるロボット工学の理論を学び理解する。次に、それを実現するコンピュータプログラムを学びプログラミングのスキルを向上する。最後に、シミュレータの仮想空間上のロボットに実装し、理論と実践の融合を目指す。
行動目標●教科書の理論を理解できる。教科書の例程度のプログラムを理解し、プログラムを作成できる。物理エンジンの基本的な使い方を理解できる。シミュレータ上で簡単なロボットプログラムを作成できる。
本科目は、ロボットに搭載される各種センサなどから得られる信号を処理、解析するために必要な手法について学習する。具体的にはデジタル信号処理を理解するために必要な、アナログ信号とデジタル信号の違い、z変換、サンプリング定理、フーリエ解析などを学び、得られる信号から所望の情報を取り出す手法を修得する。
行動目標●サンプリングによって得られる種々の離散時間信号を数式を用いて表現できる。離散時間信号のたたみ込みの計算、連続時間・離散時間および周期的・非周期的な信号に対するフーリエ解析を説明できる。信号や線形システムの周波数特性を求め、その特徴について説明できる。
ロボットがどのような構造や機能を持つか理解し、三次元空間におけるロボットの表現方法を修得する。また、剛体の動力学の基礎を修得する。さらに、比較的簡単なロボットマニピュレータを制御対象として運動方程式の導出法や、安定にロボットを制御するための位置制御や力制御の方法を修得する。
行動目標●ロボットマニピュレータの位置と姿勢を三次元空間上に表現できる。ロボットマニピュレータの順運動学問題と逆運動学問題を理解し、手先位置や関節角度を計算できる。ロボットマニピュレータの運動方程式を導出し数式モデルを表現できる。ロボットマニピュレータの位置制御や力制御を理解し、安定なフィードバック制御を実現できる。
人工知能の分野における中心的なテーマの1つに機械学習がある。機械学習は様々な分野で用いられている。たとえば、ロボットが実世界で遭遇する不確実性の取り扱いにおいて重要な役割を果たす。本科目では、機械学習をロボットに応用することができるようになるために、その基礎を習得する。
行動目標●確率に関する基本的な概念を説明することができる。重要な確率分布を説明することができる。線形回帰モデルに関する基本的な概念と手法を説明することができる。線形識別モデルに関する基本的な概念と手法を説明することができる。
機械加工とは、除去加工を中心に工作機械を用いて行われる加工法である。この加工法の特徴は、非除去加工では難しい高い寸法精度が要求される複雑形状部品をも加工することができる点である。本科目では切削加工を対象として、切削の基礎理論を学習し、これを基に適切な加工法、加工条件と工具の選定法に関する基礎知識を身につける。また、切削加工に用いられる工具作成技術を例に表面コーティング技術や粉末冶金技術についても学習する。
行動目標●切削工学における基礎的理論が理解できる。切削諸元の測定法が理解できる。切削工具損傷の形態と特徴が理解できる。粉末冶金法を用いた切削工具製造法が理解できる。仕上げ面品位が理解できる。適正な加工条件や工作機械が選定できる。
専門実験・演習では、実験・演習を通して、専門科目で取り上げられる理論や手法を学び、より深い理解力と応用力をつけることを目標とする。さらに、実験方法や実験レポートの書き方を学び、実験内容・実験結果・考察などをまとめ、発表する方法についても学習する。
行動目標●安全に配慮し、作業手順を守って実験を実施できる。専門科目などで学習した知識に基づいて、主体的に実験を実施することができる。専門科目などで学習した知識に基づいて、実験結果を整理・考察することができる。実験結果をレポートとしてまとめ、提出・説明できる。
専門実験・演習では、実験・演習を通して、専門科目で取り上げられる理論や手法を学び、より深い理解力と応用力をつけることを目標とする。さらに、実験方法や実験レポートの書き方を学び、実験内容・実験結果・考察などをまとめ、発表する方法についても学習する。
行動目標●安全に配慮し、作業手順を守って実験を実施できる。専門科目などで学習した知識に基づいて、主体的に実験を実施することができる。専門科目などで学習した知識に基づいて、実験結果を整理・考察することができる。実験結果をレポートとしてまとめ、提出・説明できる。
機械工学、ロボット工学などに関連した新しいトピックスや社会で必要となる知識を修得し、これまでに修得した知識やスキルを統合して工学系技術者として必要な力を修得することを目標とする。さらに、広い視野のもと自分の意見や考えをまとめ、ことの本質を論理的に考える力や、考え抜く力を醸成する。
行動目標●機械関連分野の基礎知識を修得し、専門分野へ応用することができる。設計製作に必要な知識と技術を修得し、実践的に活用できる。ロボティクス分野の専門知識を自ら積極的に修得できる。問題の本質を理解し、身につけた知識と技術を統合して問題を解決することができる。与えられた制約のもとで計画的に仕事をすすめ、まとめることができる。
機械工学、ロボット工学などに関連した新しいトピックスや社会で必要となる知識を修得し、これまでに修得した知識やスキルを統合して工学系技術者として必要な力を修得することを目標とする。さらに、広い視野のもと自分の意見や考えをまとめ、ことの本質を論理的に考える力や、考え抜く力を醸成する。
行動目標●機械関連分野の基礎知識を修得し、専門分野へ応用することができる。設計製作に必要な知識と技術を修得し、実践的に活用できる。ロボティクス分野の専門知識を自ら積極的に修得できる。問題の本質を理解し、身につけた知識と技術を統合して問題を解決することができる。与えられた制約のもとで計画的に仕事をすすめ、まとめることができる。
ロボットインテリジェンス、ロボットメカニクスなどの自ら設定した学習コースに関するプロジェクトデザイン III の課題について提案を行い、これまでに修得した知識・知恵・技術を用いてその課題を解決するための方法を検討することができる。これにより、技術者としての総合的な能力を活用する基盤を築くことができる。
行動目標●プロジェクトデザイン III の目標や行動計画について明確なイメージを持つことができる。ロボット工学分野の各研究室における重要技術を理解できる。プロジェクト遂行のための重要技術の基礎を応用できる。プロジェクトデザイン III のテーマを決め、研究計画書(プロポーザル)をまとめることができる。安全面に十分配慮した創作活動ができる。技術者倫理に従った創作活動ができる。
機械系技術者としての創造力、技術者の倫理観を身につけ、ロボティクスに関する製作・機構・運動・制御の原理を理解し、基礎的な動く機械を製作し、合目的に動作するための制御系設計や回路設計、プログラミングのできる能力を修得する。さらに、これからのロボット技術者に必要とされる知能や学習機能および新しいセンシング技術、制御技術の創発ができる能力を養う。
行動目標●プロジェクトテーマを定め、プロジェクトデザイン過程に基づいて行動できる。創出した成果を文書としてまとめ、発表でき、内容について議論できる。その他、別途提示された項目について主体的に行動できる。
自分の将来の進路、技術者としての職業観の形成を計るとともに、自分に適した進学・就職の目標を設定すること、およびその目標を達成するために必要な準備・対策が自主的かつ意欲的に取り組むことを目的とする。主な課題は、進路部長の講演、機械工業見本市や工場見学で、それらを通して職業に対する意識向上を図り、自分に適した進路のあり方を探求する。
行動目標●人生計画と進路との関係を自ら深く考察できる。自分の適性に合った進路を発掘すべく、それに必要な思考や行動ができる。進路の目標の設定とその達成に必要な知識、能力、素養、資格などを調査し、自ら準備・対応ができる。進学・就職など自分の進路に関する方針や目標を、他人が理解できるよう論理的に説明できる。
進学・就職の目標を明確にするとともに、その目標を実現するために、自己発掘と自己啓発による人間形成と自己向上を図ることを目的とする。主な課題は次の2つである。①自己分析や企業研究を通し、職業観を明確にするとともに、自ら進学・就職の進路決定や能力・適性に応じた職種や企業の選択ができるようにする。②進学および志望する職種、企業で要求される適性、学力、素養を調査・研究し、その対策・準備として、自ら一層の向上を目指す。
行動目標●進路選択から決定までの活動プロセスを説明できる。進学・就職活動に必要な情報を収集・分析・活用して、自主的・積極的に活動できる。進学および志望する職種や企業で要求される適性、学力・素養などの内容・水準を研究できる。
