私は「ヒトの心は身体と環境から創発する」というテーマでお話をしますが、最初に「ヒトはXXに還元できる、か」という問いに対する私なりの答えを出して、それを作業仮説として考えていきたいと思います。私の場合、「XX=身体・環境」ということになろうかと思います。ただ身体・環境といっても実は奥が深くて、進化のことを意識すれば「自然」という言い方になるし、大きなスケールで考えれば「宇宙」になるかもしれない。しかもその実体そのものではなく、そこに存在する相互作用の構造に帰着される、ということになろうかと思います。つまり私が問題視しているのはこの「身体・環境」、突き詰めれば「宇宙」の中にものすごく膨大で複雑な可能性が埋め込まれているということ。それがどういうものであって、どう変化し発展していくのだろうか、ここを理解することが人間の理解に必要だと考えるからです。
私は構成論という立場、端的に言えば「人間は作れる」という立場でものを考えます。ホントにわかってるのなら作れるでしょ、ということです。私はロボット屋ですけれど、作るという立場は何もないところから始まります。何もないところに何を置いて、どう関係をつけて、どう動かすのかという、最小限のところから始まるわけです。科学の場合はそこに存在する人間を観察するところから始まりますから、そこが大きな違いです。僕らから見ると、動物と人間の違いはすごく大きくて、その距離たるや遠くに霞んで見えるくらいの立場なのです。
但し人間を作ると言っても、正しい作り方と間違った作り方があると思っています。具体的には、「創発・発達」という原理を意識しないと正しい作り方にならない。つまり、正しい作り方は作り込むことではない、と考えています。かつては、心や身体がどういうときにどう動くのか、そういうことを表層的に書き出して、その通りに動くように作っていく方法が採られていました。でもそれでは人間は作れないというのが僕らの立場です。なぜなら、人間は本質的に適応し発達するシステムとしてできているから。人間は、決められたことを決められたように行うようなシステムとは根本的に違います。だから作り方を変えなければならない。身体・環境に内在するようなさまざまな可能性を引き出し、それを乗りこなすようなシステムとして理解して、作らなければならない。
脳が先か、運動が先か。
人間らしさというと、知能や心、脳といったものを思い浮かべると思いますが、脳がどうやってできたかを考えると、長い進化の過程の中で身体がさまざまな構造に変化していき、そしてさまざまな棲息環境の中で生き延びるために行動することによって、できあがってきたのではないかとも考えられる。口が前にあるからエサを取り込むためには前進しなくてはならないし、口をエサのあるほうに動かさねばならない。そういう必然性から感覚器が前に集まり、その情報によって身体の他の部分をコントロールする神経系という情報の構造ができた。つまり、そこにある情報と全身の運動との関係というものは、身体の構造と棲息環境で決まってくる。神経系というのはそういうものをなぞるようにできあがってきているように見えます。ですから、身体がどういう性質を持っていて何を生み出すかを理解することは、重要なことだろうと思っています。そういう例をお見せします。
 これは動物の筋骨格系の構造がどういう性質を持っているか。とくに二つの関節にまたがって引っ張る二関節筋構造に重点を置いていますが、そういう生物的な構造を空気圧人工筋という仕組みで作ったロボットの動きをお見せします。 これは動物の筋骨格系の構造がどういう性質を持っているか。とくに二つの関節にまたがって引っ張る二関節筋構造に重点を置いていますが、そういう生物的な構造を空気圧人工筋という仕組みで作ったロボットの動きをお見せします。
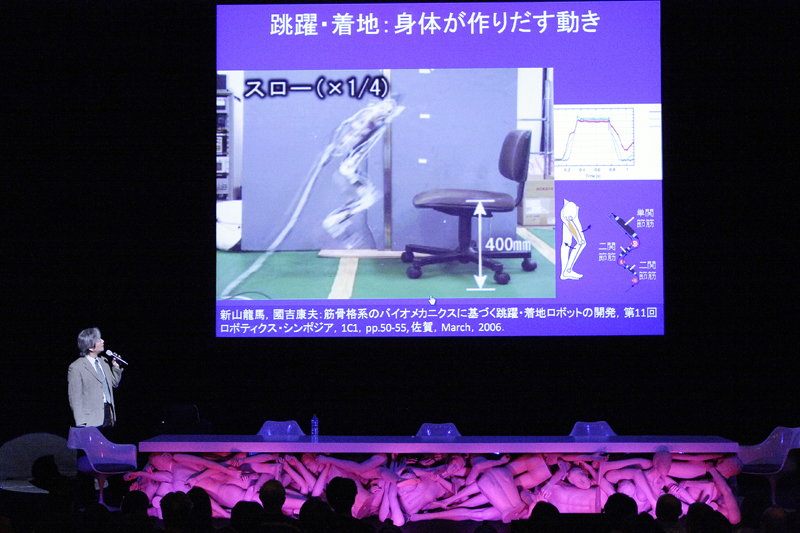
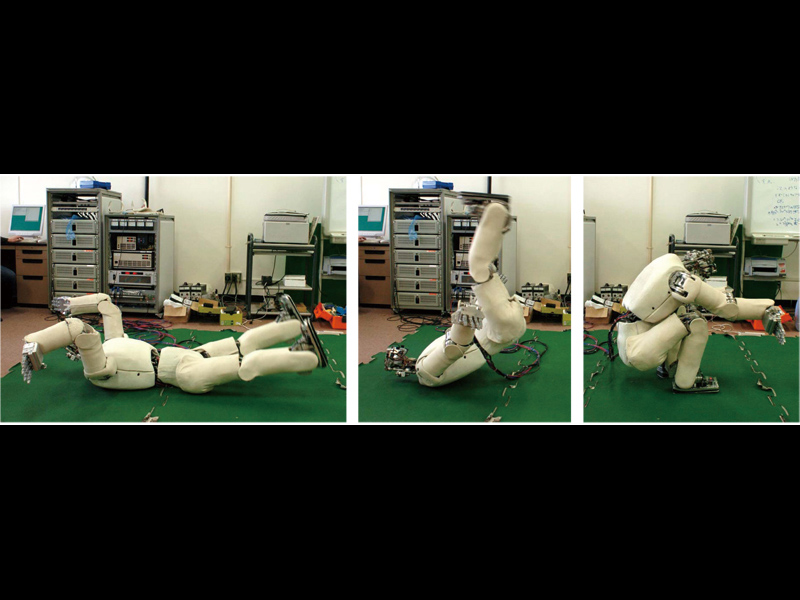
これを見たほとんどの人がカエルの動きと言うんですが、ある種生物的な動きになっています。しかしあの動きは意図的に制御したものではありません。ただすべての筋肉にせーので力を出せ、そして空中で力を抜けと指示を出した結果なんです。身体の物理的な性質によって自然発生した動き。別の例をお見せします。仰向けになって寝ている人が脚を振り上げ、その反動で起き上がる動作ですが、さまざまな人に何回もやってもらったものをモーションキャプチャーした結果、この動きには、そこだけはビシッて決めないと成功しないツボのようなものがあることがわかってきました。そしてそのツボはやはり、身体の物理的な特性によって決まっていたんですね。その動きをロボットで再現したものです。
 このロボットは身長155cm体重70kgの金属の塊ですが、失敗したときのさまざまな動きが人の情動を誘うと言うか、人間っぽさを感じさせます。このロボットの中には神経系などは一切ありませんが、単純に身体の構造や物理的な特性によってヒトらしさを生み出している。 このロボットは身長155cm体重70kgの金属の塊ですが、失敗したときのさまざまな動きが人の情動を誘うと言うか、人間っぽさを感じさせます。このロボットの中には神経系などは一切ありませんが、単純に身体の構造や物理的な特性によってヒトらしさを生み出している。
このように身体というのは実は、その形とか質量の分布だけで相当な意味を持っているのではないか。一方で脳は非常に柔軟で、学習する可塑性を持っていることががわかってきています。そう考えると、脳は身体が与えてくれるさまざまな情報に対応していっているのではないだろうかと思えます。
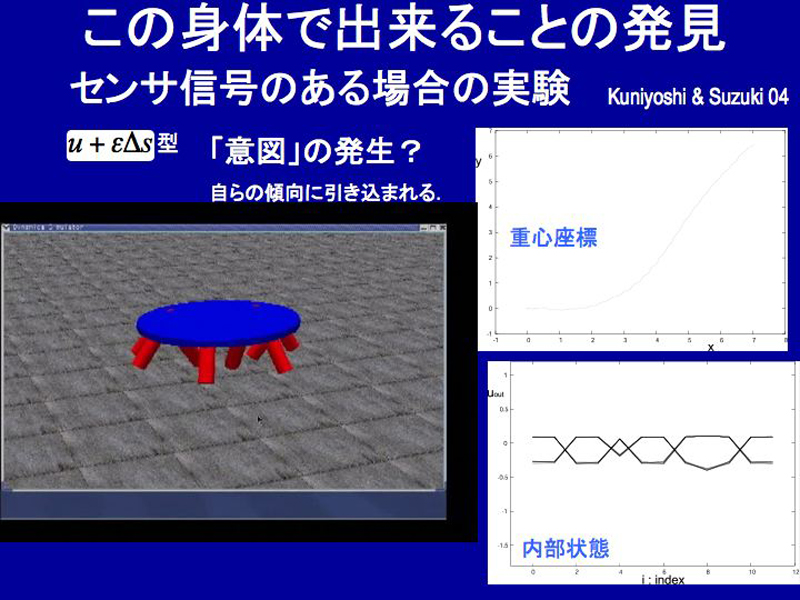
では、身体の持っているさまざまな情報を引き出す仕組みはどうしたらいいかということで、カオス写像というものを持ち込んで、ロボットにいろいろなセンサー、モーターを付け、センサーの情報をカオス写像に入力し、その出力をモーターに入れる、という仕組みを複数用意します。ここで非線形ダイナミクスという相互作用が発生し、ループが回ります。但しこのループは途中で物理的な変化を経由しているわけです。それが複数あるわけで、それが身体の中で物理的に混合され、いろいろな相互作用が影響を与え合って、とても不思議なことが起こります。実験例をお見せします。
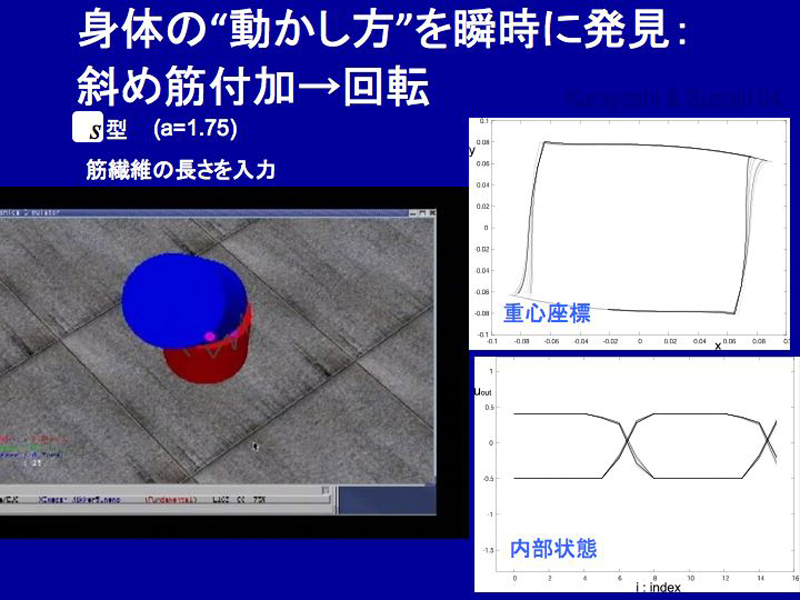
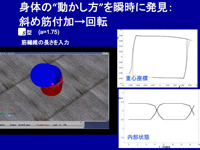 赤と青の円柱をフリージョイントでつなげ、その周囲を12本の筋肉のモデルでつないで、カオス写像につなげて動かしてみます。ご覧いただくと、リズミカルに振れて、気まぐれに方向も変えているのがおわかりになると思います。このように動くためには、ある筋肉が収縮すればその反対側の筋肉は緩まなければなりません。でも、そういう情報は一切回路には入れてありません。ちょっと動いてみたところで、身体の性質に合わせてそういう協力関係が自然発生したと考えられます。この場合のセンサー信号は筋肉の長さにしていますが、センサーを切ってしまうとぎこちない動きになります。また身体の仕組みをちょっと変えて、たとえば斜めの筋肉を足してみると、それにあったような回転運動を始めます。 赤と青の円柱をフリージョイントでつなげ、その周囲を12本の筋肉のモデルでつないで、カオス写像につなげて動かしてみます。ご覧いただくと、リズミカルに振れて、気まぐれに方向も変えているのがおわかりになると思います。このように動くためには、ある筋肉が収縮すればその反対側の筋肉は緩まなければなりません。でも、そういう情報は一切回路には入れてありません。ちょっと動いてみたところで、身体の性質に合わせてそういう協力関係が自然発生したと考えられます。この場合のセンサー信号は筋肉の長さにしていますが、センサーを切ってしまうとぎこちない動きになります。また身体の仕組みをちょっと変えて、たとえば斜めの筋肉を足してみると、それにあったような回転運動を始めます。
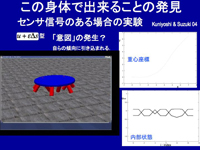 われわれが虫型と呼んでいる、円盤形の胴体に12本の脚を付けたロボットを同じ原理で動かしてみると、2、3秒のうちに脚に一定の動きが現れ、動き始めます。しかも一定方向に歩き始める。まったくの対称形に作っていますから、どっちに進むかという理由は特にないんですが、いったん動きが決まると、バラバラだった脚の動きがそれに引き込まれるようにしてある方向へ動いていくわけです。つまり各脚が作る運動が共有する胴体を振り、その胴体の動きに各脚が引き込まれて、全体として自己安定化する。これを見ていると、意図というものの原始的な原理の片鱗を見るような気さえしてきます。ある傾向を完全に内発的に作り出し、自分自身を律するわけです。 われわれが虫型と呼んでいる、円盤形の胴体に12本の脚を付けたロボットを同じ原理で動かしてみると、2、3秒のうちに脚に一定の動きが現れ、動き始めます。しかも一定方向に歩き始める。まったくの対称形に作っていますから、どっちに進むかという理由は特にないんですが、いったん動きが決まると、バラバラだった脚の動きがそれに引き込まれるようにしてある方向へ動いていくわけです。つまり各脚が作る運動が共有する胴体を振り、その胴体の動きに各脚が引き込まれて、全体として自己安定化する。これを見ていると、意図というものの原始的な原理の片鱗を見るような気さえしてきます。ある傾向を完全に内発的に作り出し、自分自身を律するわけです。
ではなぜこのような実験をしたのか。身体を動かして発生した身体に適合する運動が、将来の話として、脳神経系の形成に影響するのではないかと考えるからです。僕らのシナリオとしては、そうやってできあがった脳神経系が駆動することでさらなる情報を引き出し、それがループして育っていくのではないか。そういうことがヒトでも起こっているのではないか。そう思う理由はいろいろありまして、たとえばカオスの原理は、ヒトの脊髄、延髄の神経系の特性にとても当て嵌まるんです。
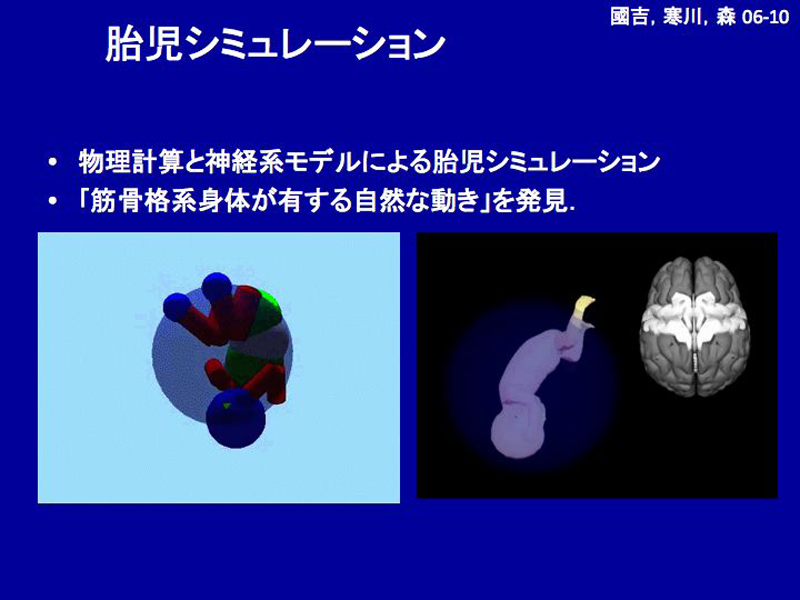
では本当にそういうことが起きるかをヒトの身体のモデルでやってみます。ロボットの技術を使うと筋骨格系のシミュレーションができます。つまり骨格を想定し、筋肉を貼ってみる。その筋肉を収縮させたときに全身がどう動くかをシミュレーションするわけです。
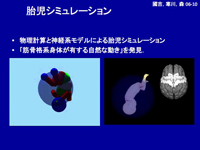 これは発達するシステムですから、なるべく初期、まず胎児からやっています。できるだけ正確に胎内の環境、羊水や子宮壁などを再現します。そして受胎後何週というパラメータで決定した胎児の身体に、200本ほどの生理学的に妥当な筋肉を貼付け、そして脊髄内には神経回路を入れ、延髄モデルも筋肉1本1本につなげています。僕らは身体がどういう意味を持っているかに興味があるので、そこに関わるシミュレーションはきっちりやるわけです。それらをつなげて、大脳皮質のモデルを作ります。それは自己組織化ニューラルネットワーク、つまり、動かされた身体から入ってくる感覚、運動の情報をもとに、それがどういう構造を持ち、どう分類できるかを学習するモデルです。 これは発達するシステムですから、なるべく初期、まず胎児からやっています。できるだけ正確に胎内の環境、羊水や子宮壁などを再現します。そして受胎後何週というパラメータで決定した胎児の身体に、200本ほどの生理学的に妥当な筋肉を貼付け、そして脊髄内には神経回路を入れ、延髄モデルも筋肉1本1本につなげています。僕らは身体がどういう意味を持っているかに興味があるので、そこに関わるシミュレーションはきっちりやるわけです。それらをつなげて、大脳皮質のモデルを作ります。それは自己組織化ニューラルネットワーク、つまり、動かされた身体から入ってくる感覚、運動の情報をもとに、それがどういう構造を持ち、どう分類できるかを学習するモデルです。
これを動かしてみると、脚を突っ張るなどの胎児の特徴的な動きが生じたりします。また、乳児のモデルでのシミュレーションでは、たとえば寝返りをうったり、ハイハイに似た動きをしたりします。もちろんモデルに貼付けた筋肉同士の関係情報は一切こちらで用意していません。それにも関わらず、身体の特性から必然的に現れた動きのように見えます。
つまり、身体に内在する情報というのは決してバカにできないのだろうと。それに従い、大脳皮質がどのように自己組織化するかを調べています。最近では、ヒトの赤ちゃんの発達とどれくらい対比できるかという実験もしています。そうすると、ヒトの赤ちゃんとかなり近いシミュレーション結果が得られています。
我々はそれがすべてと主張するつもりはありませんが、そういうロジックもあり得るという可能性を示そうとしているわけです。そして現在では、周囲や他者とやり取りしながら発達していく、つまり受容器をつけた赤ちゃんのロボットでシミュレーションもさまざまに行っています。
まとめますと、身体・環境がどういう可能性を提供してくれるのかを理解することが重要であると、われわれは思っています。そしてヒトは作れるという立場で、その理解を追求しなければならないと考えています。僕らは、人間はこういうものだろうと思うものを作り、「これは人間とどこが違う?」と尋ねて、それを踏まえてまた次のロボットを作る。これしかないのだろうなと、思っています。僕のレクチャーはこれで終わります。ありがとうございました。
|