第4回 おつかいロボットを動かそう
○開催日/2009年9月26日(土) ○時間/9:00~15:30 ○場所/金沢工業大学
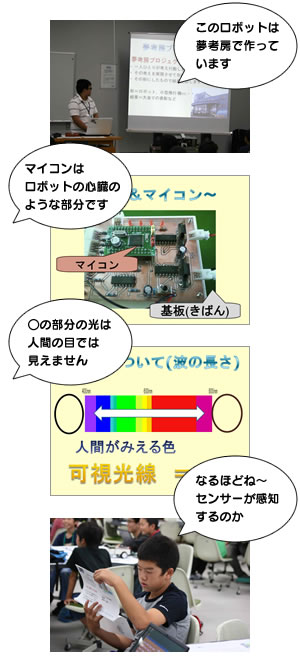
○教えてくれた学生/夢考房自律走行車プロジェクト
ラインに沿って走るおつかいロボットの操縦に挑戦! ロボットの操作と調整を繰り返すことで、エンジニアの‘大変さ’と‘楽しさ’を体験しました。
【学びのポイント1】 自力で走るおつかいロボットって?
みなさん、頭の中にロボットをイメージしてください。アニメーションや漫画の世界に登場するような人間型ロボットを思い浮かべた人が多いのではないでしょうか?しかし、人間型ロボットだけをロボットと呼ぶわけではありません。身近なところを見てみると、人間の型をしていないUFOキャッチャーもロボットの仲間なのです。今回、みんなが操縦するのは、タイヤが付いた車型のおつかいロボットです。
最初の講義では、黒い線に沿って自力で走るおつかいロボットの仕組みを学びましょう。
講義の時間
教えてくれるのは夢考房・自律走行車プロジェクトの学生さんです。
黒い線に沿って走るおつかいロボットの仕組みを学ぼう。

学生「みんなはロボットと聞くと、どのようなものをイメージしますか?ドラえもんかな?それともガンダムですか?」
キッズ「ガンダム!」
学生「漫画に出てくる人間の型をしたロボットをイメージする人が多いと思います」
学生「今日、みんなが操縦するのは黒い線に沿って走る車型ロボットです。まずはロボットの部品を説明すると、上部に付いているのが基板とマイコン。下部に付いているのがセンサとLED。タイヤとモータも下部に付いています」
学生「ロボットの詳しい仕組みを説明する前に、光の説明をしましょう。光は音と同じように波の性質を持っていて、波の長さによって、光が見えたり、見えなかったりします。スクリーンにあるように、○で印をした部分の光は見えません」
学生「ちょっとむずかしいかな。ここでひとつクイズです。赤外線の波の長さはどれくらいでしょう? 1の約100~400nm(nmはcmの1/10000000)だと思う人、じゃあ2の約400~700mは? 3の700~1000nmだと思う人」
キッズ「はーい」
学生「みんなすごいですね、全員正解です!」
学生「赤外線のように、人間には見えない光のことを不可視光線といいます。おつかいロボットのLEDとセンサにはこの赤外線が使われています。それでは、おつかいロボットが動く仕組みを見ていきましょう。車の下部に付いているLED(電球のようなもの)から地面に光を当てます。白い部分に光を当てると反射しますが、黒い部分に当てると光は反射しません。つまり、センサ(光を感知するもの)が反射した光をとらえれば、その部分は白、とらえなければ黒ということになります」
学生「センサがラインを黒と判断すれば、ロボットの心臓部ともいえるマイコンからモータを動かす指令が発せられ、車が動き出すという仕組みです。それでは、実際にお兄さんがロボットを操縦するところを見てみましょう!」
学生「みんな、実演をするので集まってください。パソコンにモータとセンサの数値を入れて、線が描かれた大きな紙のスタート地点にロボットを置きます。電源を入れると、このように動き出します!」
キッズ「お兄さん、ちょっとコースアウトしているよ!」
学生「それだけ難しいってことなんです…」
- 基板
- 電子部品が取り付けられ、電気回路が組み込まれた板のこと。マイコンの基礎の部分です。
- マイコン
- マイクロコンピュータの略で、コンピュータの心臓部ともいえます。入力することによって送られたデーやセンサからのデータを読み取り、プログラム(命令)を実行します。おつかいロボットではセンサから送られたデータを読み取り、モータを動かす命令を出しています。
- センサ
- 音・光・温度・圧力・流量(液体と気体が移動する量)などの物理量を検知し、処理しやすい信号に変換する素子(電気回路の中で、全体の機能に重要な役割を持った個々の部品)のことです。
- LED
- Light Emitting Diodeの略。電気を通すことで発光する半導体(電気を良く通す良導体と、通さない絶縁体に対し、その中間の性質を持つ物質)のことで、発光ダイオードともよばれています。白熱ランプや蛍光灯と比べ、消費電力がとても少ないという特徴があります。
- モータ
- 電気エネルギーを機械エネルギーに変える装置のこと。電動機のこと。
- 赤外線
- 目に見えない電磁波のうち、赤色よりも波長が長いもの。波の長さは約700~1000nm。リモコンや携帯電話の通信機能、暖房器具、医療機器などに利用されています。
- nm
- cmを1/10000000にした長さの単位で、ナノメートルと読みます。身近なもので考えると、髪の毛を1/1000にした太さです。
【学びのポイント2】 おつかいロボットを思いどおりに操縦しよう。
おつかいロボットの仕組みがわかったところで、さっそく操縦してみましょう。ロボットを思いどおりに走らせるためには、パソコンを使ってロボットの動きを調整しなくはいけません。まずはロボットを走らせるルートを決め、目的地にたどり着くよう各交差点での進行方向を入力します。また、走行するロボットの動き方を見ながら、モータとセンサ、速度と時間を調整します。
ロボットといっても、ボタンを押せばすぐにスムーズに動いてくれるわけではありません。何度も失敗を繰り返し、ロボットが思いどおりに動くベストな数値を導きだしましょう!
ロボット制御の時間
コースアウトせずに、うまく目的地にたどり着けるかな?
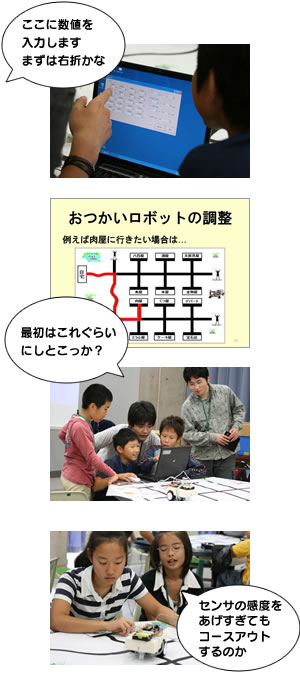

学生「みんなも、おつかいロボットを操縦してみましょう。2人1組でチームになってください。ロボットが走るルートを決めて、それにしたがって各交差点での進行方向を入力します。例えば、肉屋に行きたいなら、最初の交差点を右折、2つ目を左折、3つ目を右折。肉屋に着いたらターンして、右折、右折、左折で自宅へ戻りますね」
キッズ「入力できました」
学生「モータのパーセンテージを上げると、ロボットのスピードが速くなり、センサの数値を上げるとラインを感知しやすくなります」
キッズ「じゃあ、スピードをすごく速くして、センサの感度を上げればいいの?」
学生「そこが難しいところで、スピードが速すぎるとコースアウトしやすくなるし、だからといって遅すぎると時間がかかりすぎてしまいます。センサの感度が悪いと線を確認できなし、感度が良すぎると別のものを線だと勘違いしてしまい、これもコースアウトの原因になります。各班にお兄さんがいるので、教わりながら調整してください」
キッズ「はーい」
学生「じゃあ、まず走行ルートを決めようか。どこに行く?」
キッズ「ケーキが好きだから、ケーキ屋さん」
学生「ケーキ屋さんに行くには最初の交差点を右折して、次はどうすればいいかな?入力してみて」
キッズ「次を左折、次を直進、次を右折で到着。帰りはターンして左折、直進、右折、左折で自宅へ帰ります」
学生「スゴイ、正解。じゃあ、最初はモータを70、センサを300に設定して動かしてみよう。大きくコースアウトしたり、スピードが遅すぎたら調整してね」